The analysis of a hovering darner continues in this post. Part I can be found at the following link:
http://thedragonflywhisperer.blogspot.com/2014/01/a-hovering-darner-part-i.html
Last time, we saw that a hovering darner was actually "bobbing" up and down several times per second as it hovered, a frequency much slower than the rate of its wingbeats. We also produced a plot showing all twenty up-and-down "bobs" that the darner made in a five-second video clip.
To see the vertical motion in greater detail, we expand the plot and show the flight level of the darner for a period of 1.6 s. Notice that the bobbing motion is remarkably regular in both frequency and amplitude. I really hadn't expected to find such a nicely sinusoidal behavior.
The sinusoidal motion of the darner is well represented by the mathematical relation
y(
t) =
A sin(
wt), where
y is the flight level relative to the average height,
w is the angular frequency,
t is the time in seconds, and
A is the amplitude of motion. From the above figure, we can see that the amplitude is approximately
A = 0.40 cm, and the period of motion is about
T = 0.22 s. From the period of motion, we can obtain the angular frequency
w as follows:
w = 2π/
T = 29 rad/s.
The result for the angular frequency becomes important when we calculate the vertical acceleration of the darner. To begin, we note that the acceleration
a(
t) is obtained by taking two time derivates of the position; that is,
a(
t) = d^2
y/d
t^2 = –
Aw^2sin(
wt). It follows that the maximum upward or downward acceleration of the darner is
Aw^2 = 3.4 m/s^2. This is roughly 1/3 the acceleration due to gravity.
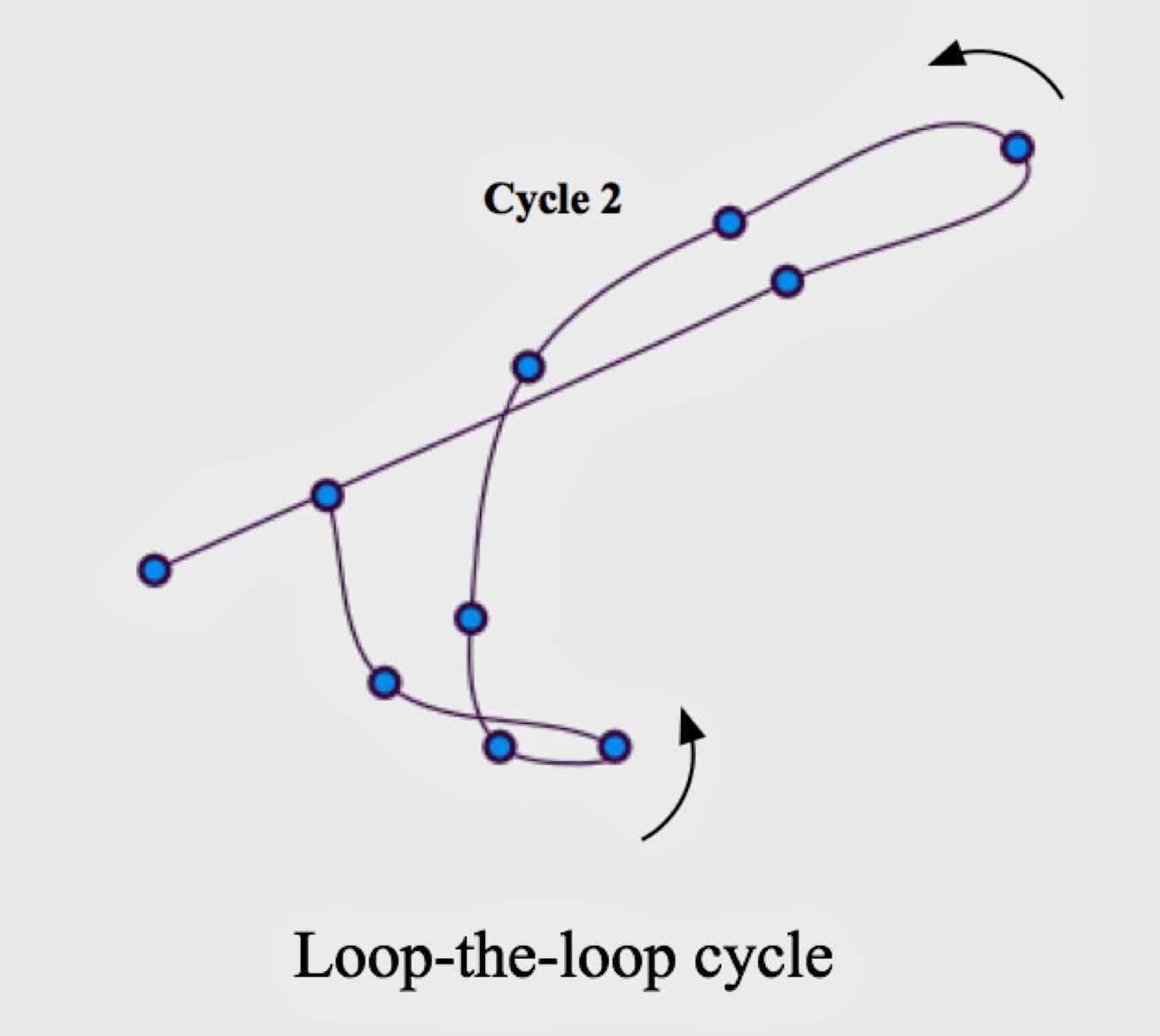
It follows, then, that the darner flaps weakly for about 4 flaps, resulting in a downward acceleration, followed by 4 strong flaps, resulting in an upward acceleration. This is illustrated in the next figure.
One explanation for the bobbing motion during hovering is that the alternating spurts of strong and weak wingbeats gives the darner a chance to rest on the wing – a little like wind sprints in humans. Another possibility is that the bobbing motion is a display mechanism – bobbing up and down may increase a darner's visibility to his rivals, letting them know where his territory is, and that he is on guard and ready to attack any intruders.
The last installment in the hover analysis will be posted tomorrow.